Se preferir assista no youtube.
Assistindo vídeos no Youtube encontrei muitos robôs feitos com servomotores. Alguns mais simples outros muito sofisticados como o BIOLOID e o I-SOBOT que, são produzidos por empresas e vendidos por preços que giram em torno dos US$1500, passando facilmente disto dependendo do modelo e dos assessórios. Os modelos comerciais aparentam ser bastante flexível principalmente o BIOLOID que pode assumir diversas formas dependendo da criatividade do dono. Dos aparentemente caseiros, este me chamou a atenção. A estrutura física do que eu construí foi baseada no robô deste video.
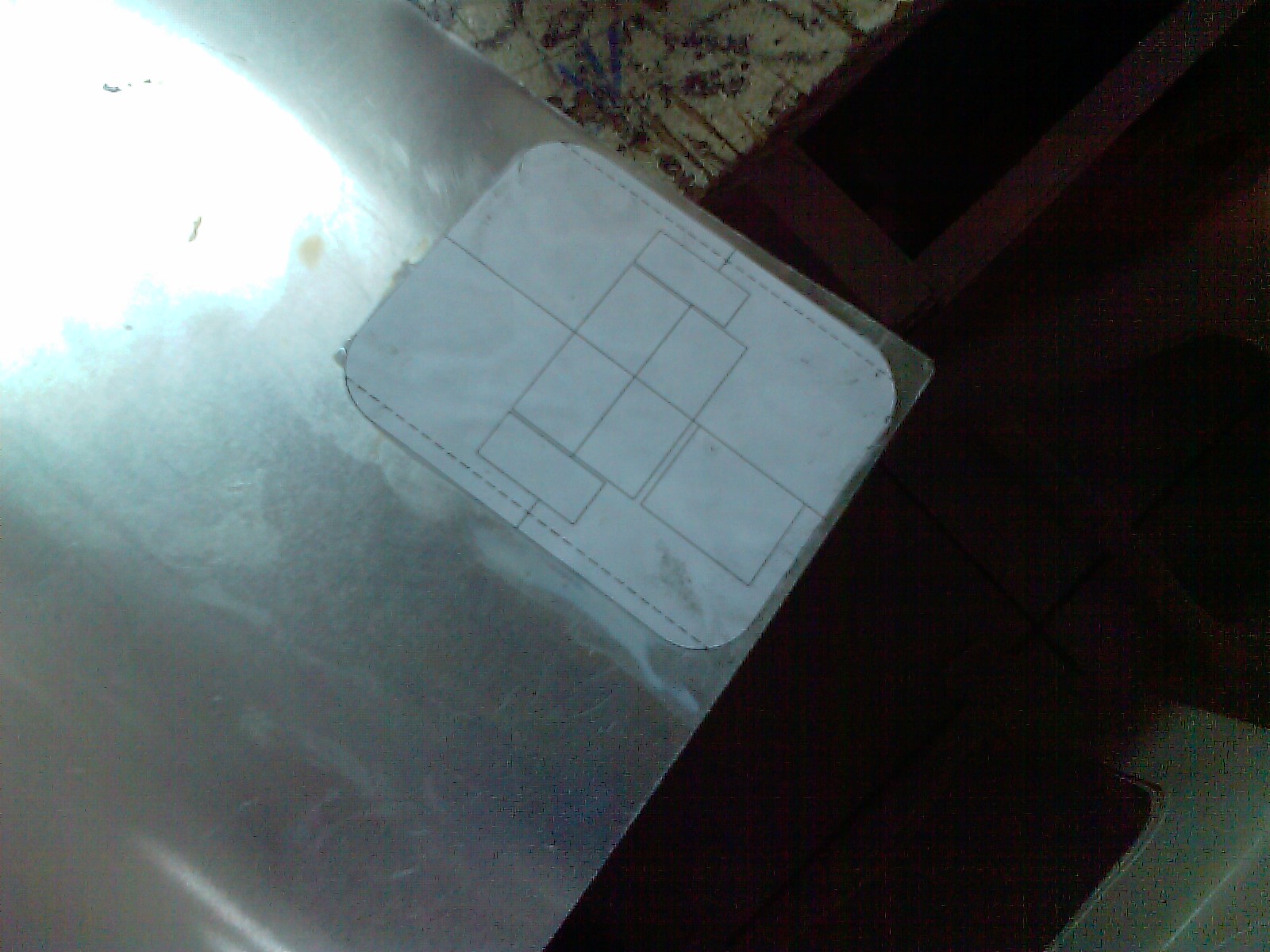
A estrutura física foi o que deu mais trabalho. Basicamente a peça é desenhada impressa e colada numa chapa fina de alumínio, cortada e dobrada. Os servos foram fixados com parafusos. As partes articuladas usam parafuso, porca e contra porca para manter a folga.





O código, que foi feito apenas para ver o "bicho" funcionando, é mostrado abaixo. Ele faz o robô andar para frente, retorna à direita, anda novamente para frente e anda para traz. A idéia básica para fazé-lo andar para frente é mandar o mesmo sinal para servos paralelos em cada perna. Por exemplo: servo 1 da perna um e servo 1 da perna 2 recebendo o mesmo sinal simultaneamente.
O manual da shield incluindo a biblioteca pode ser visto neste site.
O manual da shield incluindo a biblioteca pode ser visto neste site.
Estou pretendendo acrescentar mais servos e alguns sensores. Se tudo der certo eu posto os resultados.
Vou tentar também fazer um passo-a-passo para auxiliar alguém que queira montar o robô.
Vou tentar também fazer um passo-a-passo para auxiliar alguém que queira montar o robô.
int pe1 = 14; // motor 1 da perna esquerda ( de baixo para cima)
int pd1 = 15; // motor 1 da perna direita ( de baixo para cima)
int pe2 = 13; // motor 2 da perna esquerda ( de baixo para cima)
int pd2 = 12; // motor 2 da perna direita ( de baixo para cima)
int i = 1500;
int a = 1500;
#include <ServoShield.h> // inclui a biblioteca ServoShield que deve ser baixada e adicionada a pasta libraries do arduino
ServoShield servos; //Cria um objeto ServoShield
void setup()
{
servos.start();
for (int servo = 0; servo < 16; servo++)//inicializa todos os servos
{
servos.setbounds(servo, 500, 2500); //seta a faixa de pulso maximo e minimo
servos.setposition(servo, 1500); // todos os servos na posição central
}
delay(2000);
}
void loop() // laco pricipal
{
for(int a = 0; a < 7; a ++) //frente
{
inclina_esq();
pd_frente();
inclina_dir();
pe_frente();
}
descansar();
for(int a = 0; a < 10; a ++) //roda a direita
{
inclina_esq();
pd_frente();
desenclina_esq();
pe_frente();
}
for(int a = 0; a < 7; a ++) //frente
{
inclina_esq();
pd_frente();
inclina_dir();
pe_frente();
}
descansar();
for(int a = 0; a < 7; a ++) //re
{
inclina_esq();
pe_frente();
inclina_dir();
pd_frente();
}
descansar();
} // fim do laco pricipal
void inclina_esq() // inclina para esquerda
{
for(; i <= 1730; i++)
{
servos.setposition(pe1, i);
servos.setposition(pd1, i);
delay(1);
}
}
void desenclina_esq()
{
for(; i >= 1500; i--)
{
servos.setposition(pe1, i);
servos.setposition(pd1, i);
delay(1);
}
}
void inclina_dir() // inclina para direita
{
for(; i >= 1270; i--)
{
servos.setposition(pe1, i);
servos.setposition(pd1, i);
delay(1);
}
}
void pd_frente() // pe direito a frente
{
int aux = a + 700;
if (aux > 1900)
aux = 1900;
for(; a <= aux ; a++)
{
servos.setposition(pe2, a);
servos.setposition(pd2, a);
delay(1);
}
}
void pe_frente() // pe esquerdo a frente
{
int aux = a - 700;
if (aux < 1100)
aux = 1100;
for(; a >= aux; a--)
{
servos.setposition(pe2, a);
servos.setposition(pd2, a);
delay(1);
}
}
void descansar() // coloca suavemente todos os servor na posicao central 1500
{
int pos;
int cnt = 0;
int aux[16]= {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
while(cnt != 16)
{
for (int servo = 0; servo < 16; servo++)
{
pos = servos.getposition(servo); // pos recebe a posicao atual do servo
if(pos > 1500)
pos--;
else if(pos < 1500)
pos++;
else if(aux[servo] != 1)
{
aux[servo] = 1;
cnt ++;
}
servos.setposition(servo, pos);
}
delay(1); // determina o qual lento é o movimento de retorno a posicao inicial
}
i = pos;
a = pos;
}